Neural Networks and Deep Learning
This is a course part of the Deep Learning Specialization
Intro to DL
ReLU = Rectified Linear Unit:
Hidden Layers of a neural network learn more complex patterns in your data. The magic of NN is that you do not need to learn explicitly what are these patters.
Every hidden layer is a complex function of the input layer.
Applications of different DL
- Standard NN, Feed Forward NN: Home prices, Ad prediction
- CNN: images
- RNN: sequential data (audie, NLP, language, translation), temporal component
Structured data = tabular
Unstructured data = text, images, audio,
Why DL is taking off now?
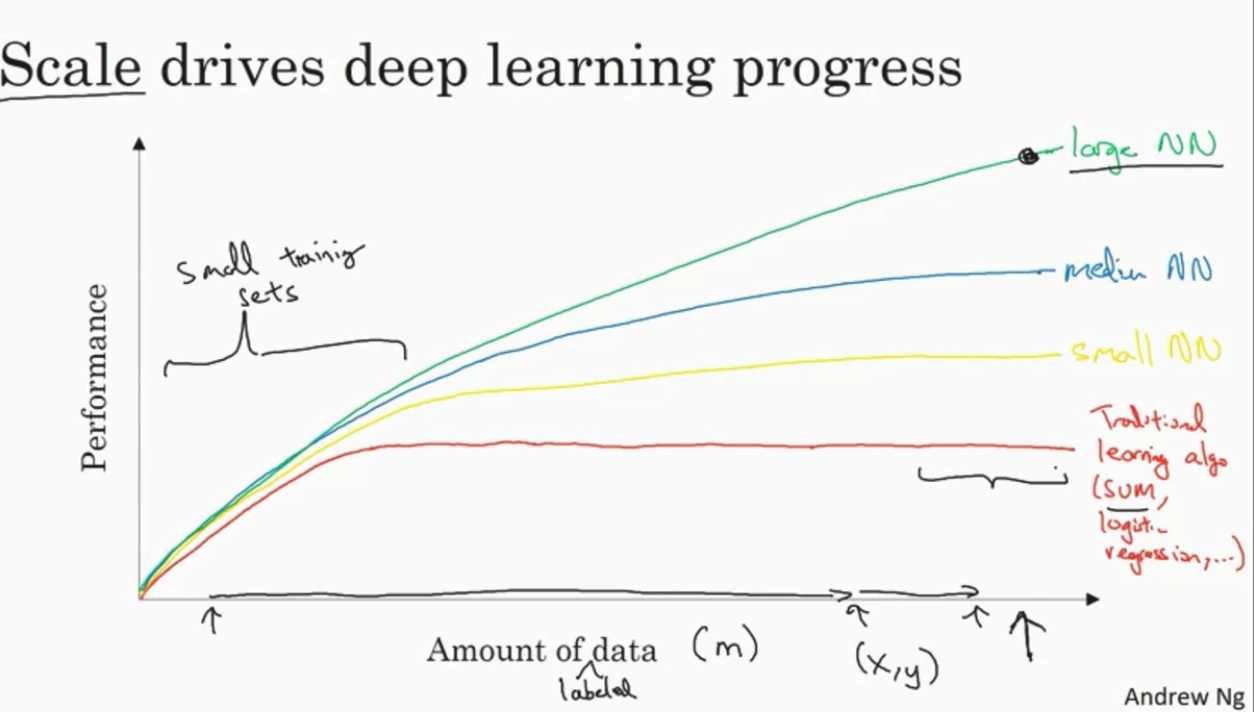
When data is small, the rank of ML/DL algos depends much on your skills on modelling and architecture building. When data is big, usually NN are better.
Innocations:
- More data
- faster computation (CPU, GPU...)
- better algorithms
Sigmoid activation function to RELU the computation is much faster, Relu has gradient 1 for positive values, sigmoid can have gradient close to 0.
Logistic Regression as a Neural Network
Binary classification of an image - flatten all pixels into one vector
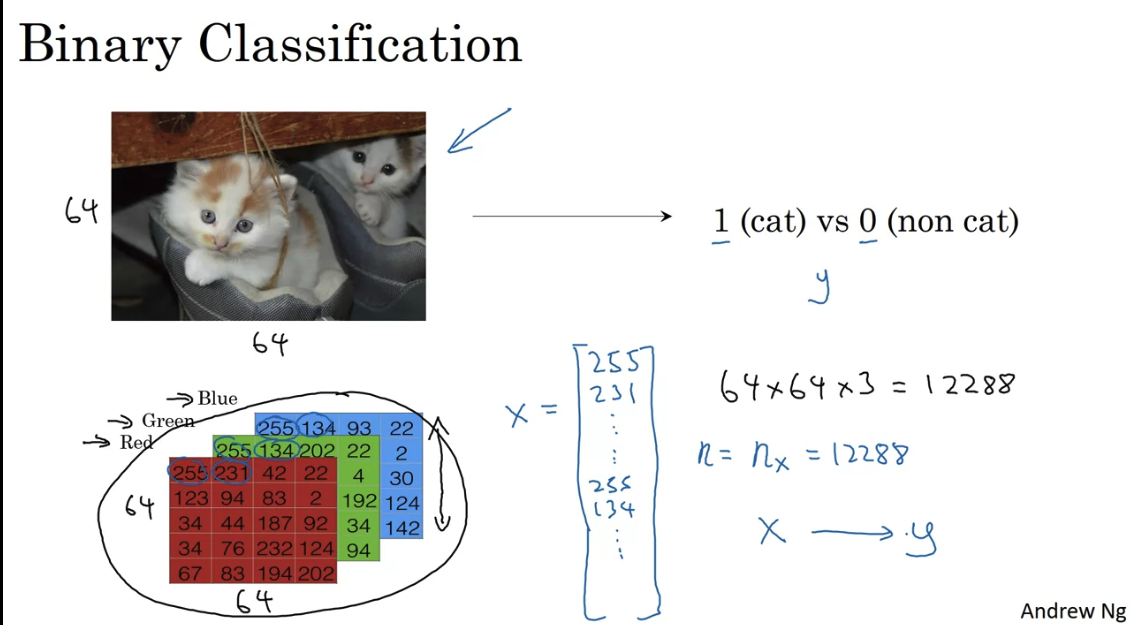
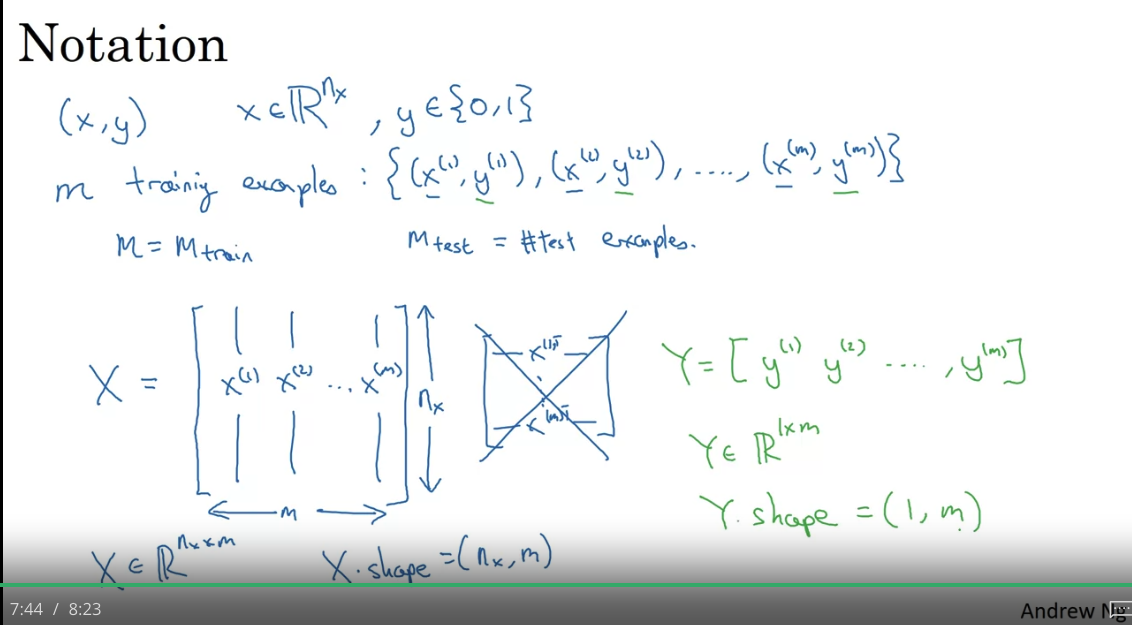
In NN the design matrix would have dimension - it is easier that way (transposed of ML design matrix)
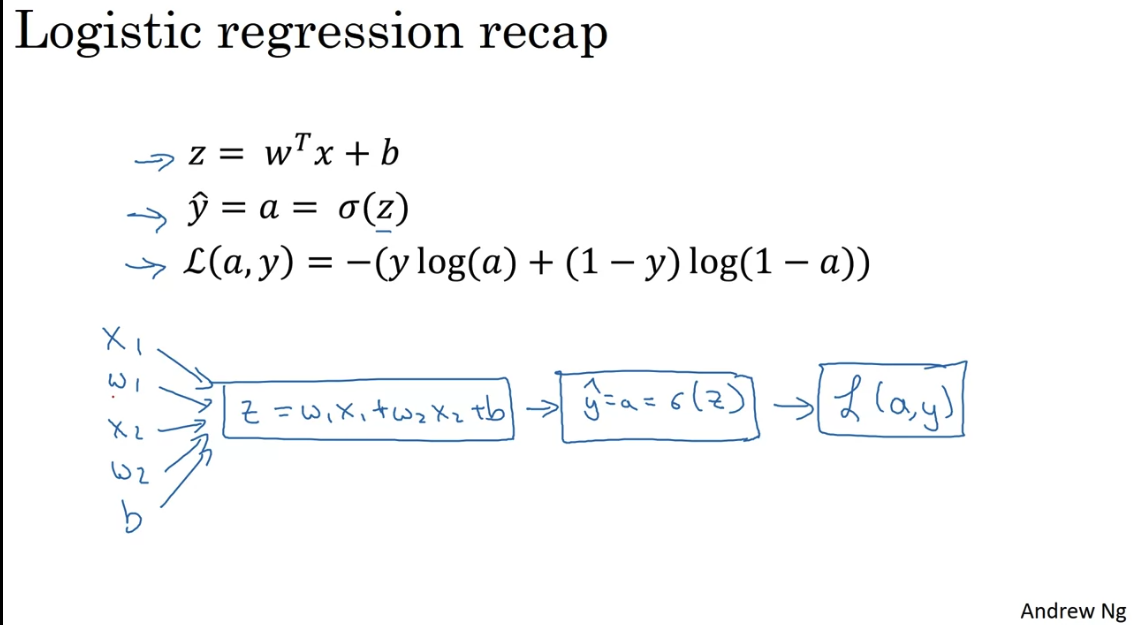
Logistic regression is just applying sigmoid function to the linear model, and using logistic loss function.

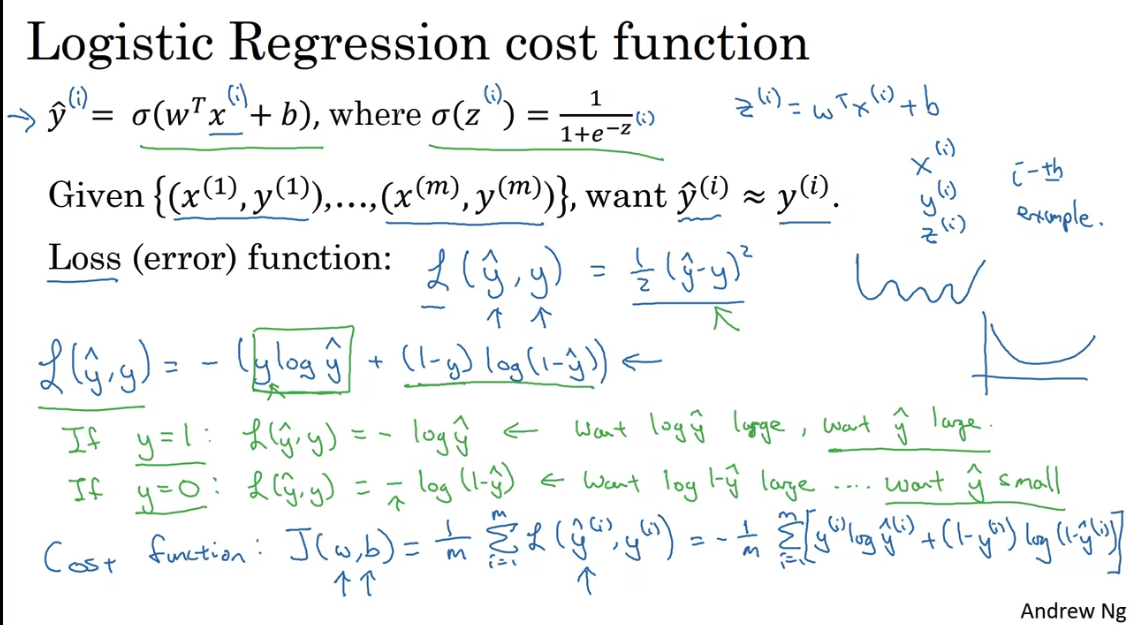
Note in logistic regression we predict which represents a probability between 0 and 1. We use the ogistic losss function so that we have a convex cost function. No matter where you initialize, you would reach the global minimum.
Logistic loss = - Log likelihood
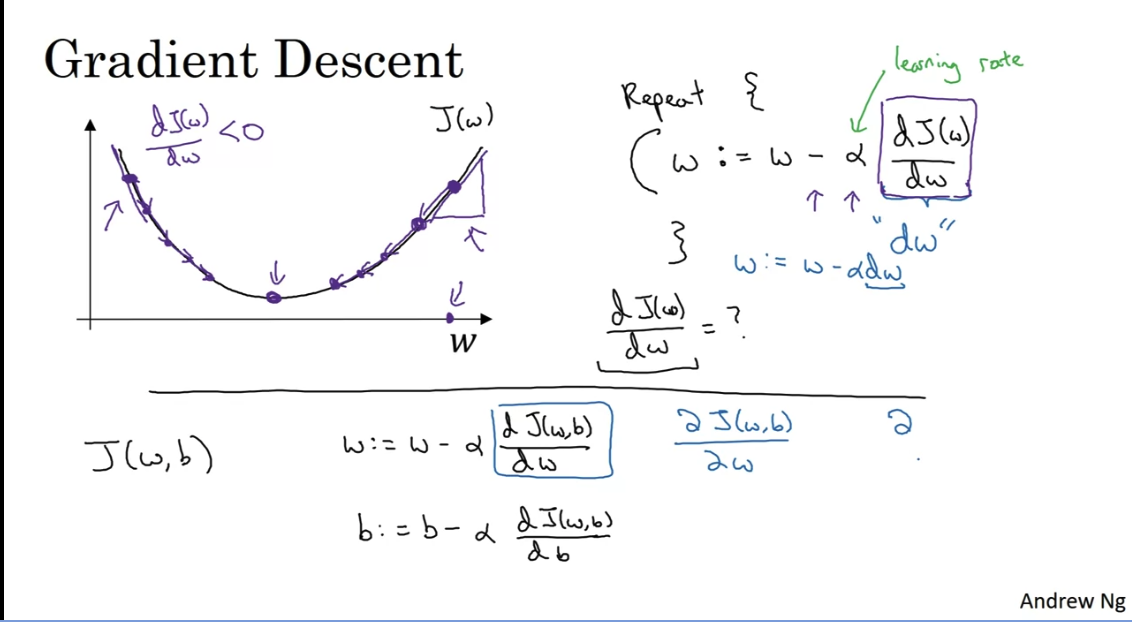
Gradient Descent
, where J is the loss function
The gradient is equal to the slope of the tangent function. Math derivation:
Say for you want to find the tangent line at point
Then must have one solution. Take derivative of both sides:
Note that at each step we go to the opposite direction of the derivative with a step size of . By the graph above you can see how we slowly go to the optimum value. You can use also only the sign of the derivative. But using the derivative itslef gives you smaller stepsize when you are closer to the optimum value.
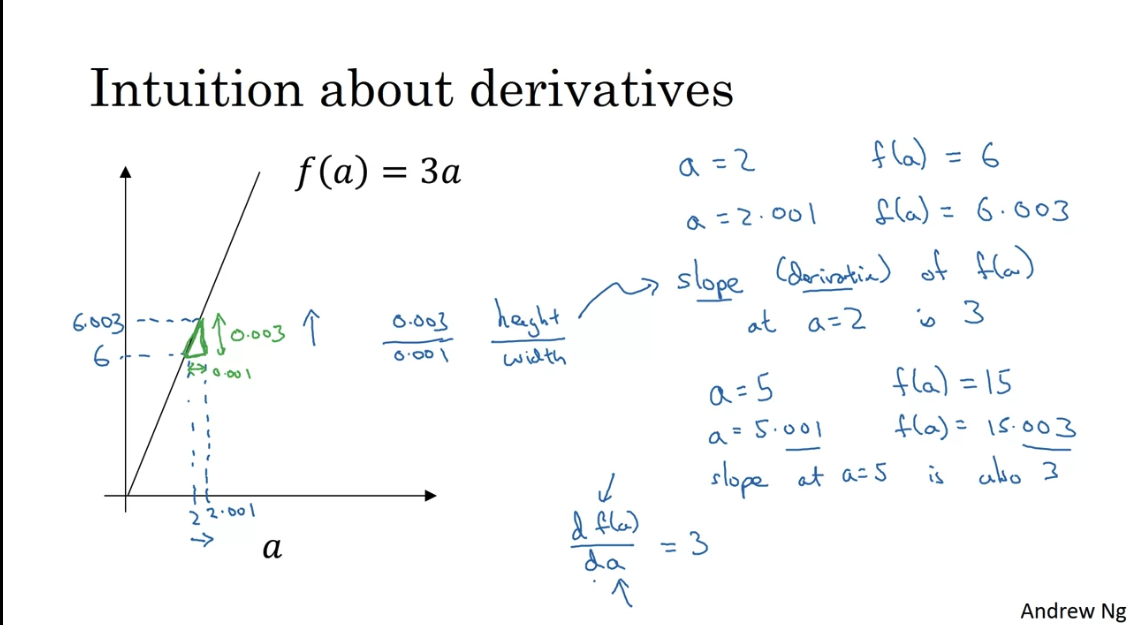
Derivative = slope = change in / change in = how much would change if you change by a little bit. In the picure above if you nudge by 0.001, then changes by 0.003
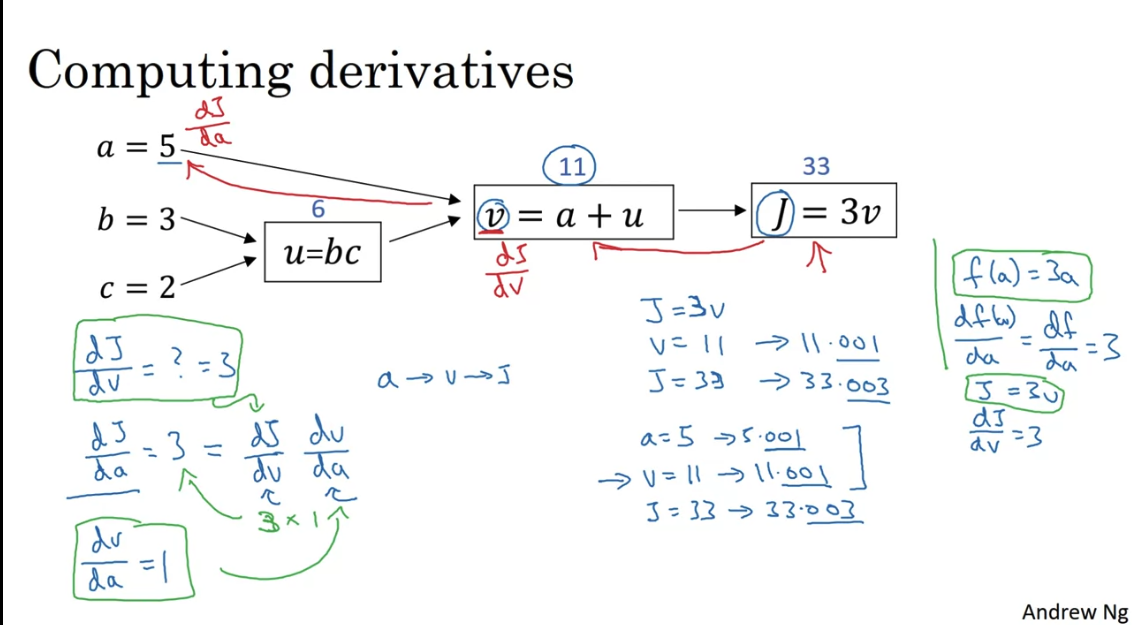
Computation Graph
NN are organised in terms of:
- forward propagation: compute output of NN
- backward propagation: compute gradient of the loss function with respect to parameters
The computation graph organises these two steps.
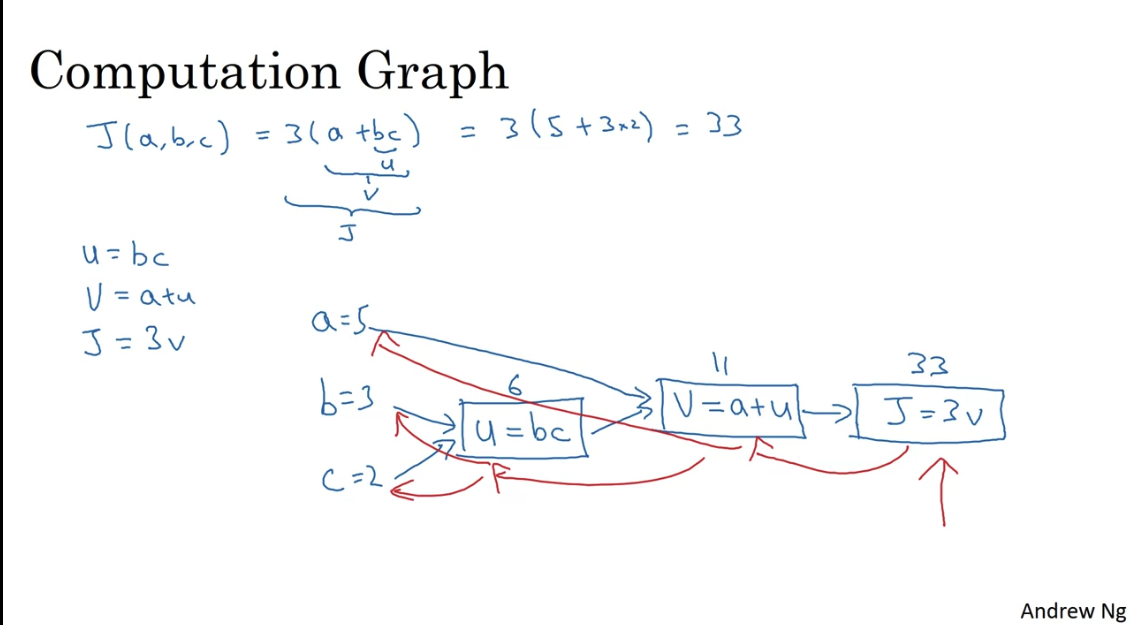
Backprogation is just an application of the chain rule.
Changing by 0.001, changes by 0.003, hence . When you change by 0.001, changes by 0.003, hence . But also changing changes which changes . . This is the chain rule.
Logistic regression computational graph
below
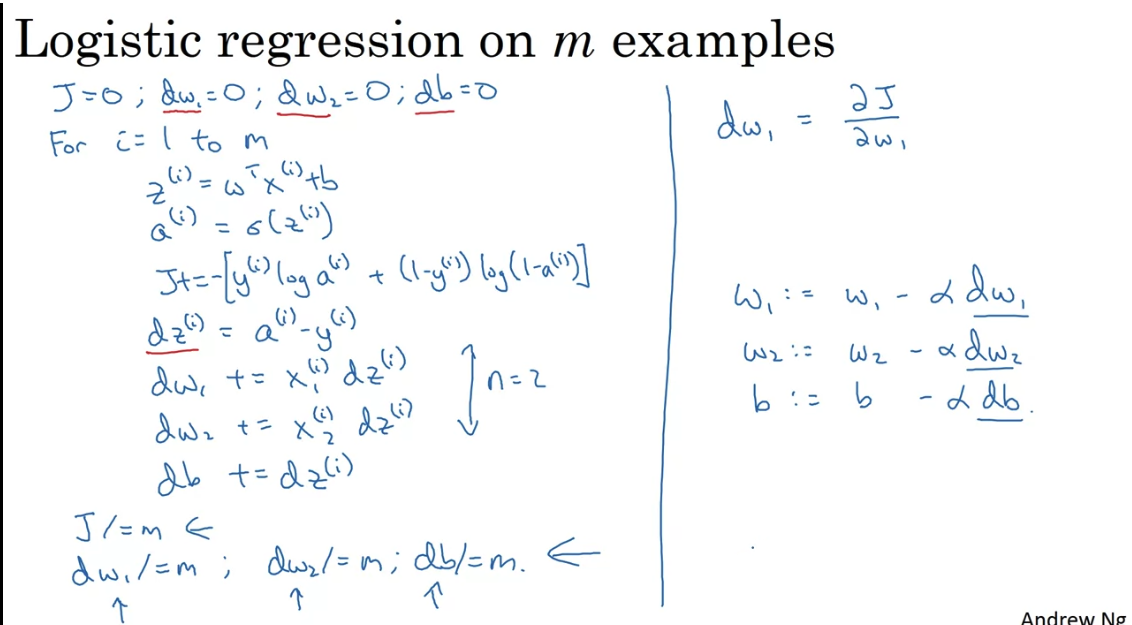
Goal is to compute , , , , where the first two are the gradients of the loss function with respect to the parameters, and the last two are the gradients of the loss function with respect to the intermediate variables.
One step gradient descent for logistic regression gradient descent:
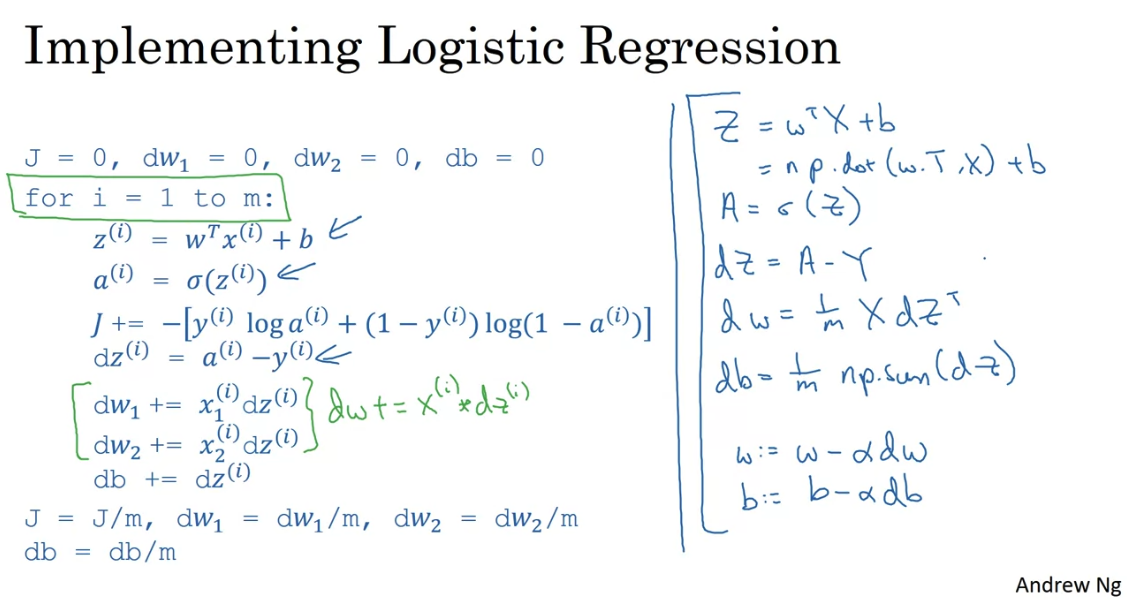
Vectorization
Great speedups. Instead of looping over all examples, you can do the computation in one go.
Broadcasting in Python
Broadcasting copies automatically the vector to the right shape. For example:
np.array([1,2,3,4]) + 100 = np.array([101,102,103,104])
np.array([1,2,3,4],[5,6,7,8]) + 100 = np.array([101,102,103,104],[105,106,107,108])
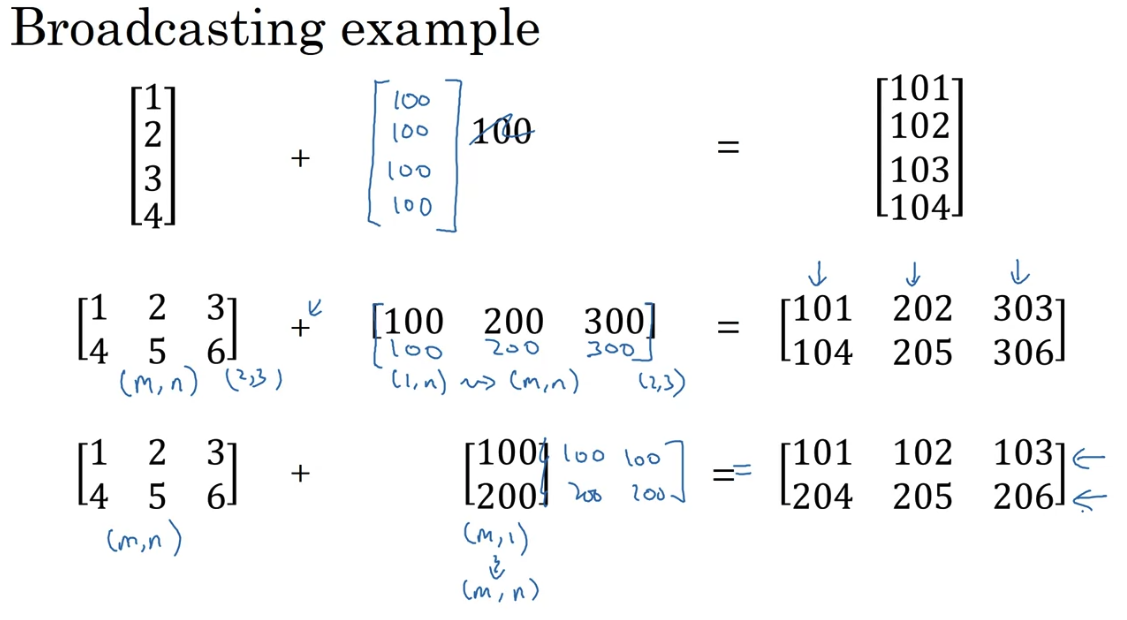
matrix division by vector gives matrx
NOTE on vectors Use:
np.random.rand(5,1) # shape is (5,1) - column vector
Do not use:
np.random.rand(5) # shape is (5,) - that is nothing
Tip:
- add assert statements to check the shape of the vectors
asser (w.shape == (n,1))
Remember:
- the sigmoid function and its gradient
- image2vector is commonly used in deep learning
- np.reshape is widely used. In the future, you'll see that keeping your matrix/vector dimensions straight will go toward eliminating a lot of bugs.
- numpy has efficient built-in functions
- broadcasting is extremely useful
Shallow Neural Networks
For one training sample:
One hidden-layer NN = Two layer NN (inpuut layer is not ussually counted)
First layer: ,
Second layer: ,
Assume we have input features, hidden units, output units. Then the dimensions of the matrices are: is x , is x , is x , is .
For multiple training sample:
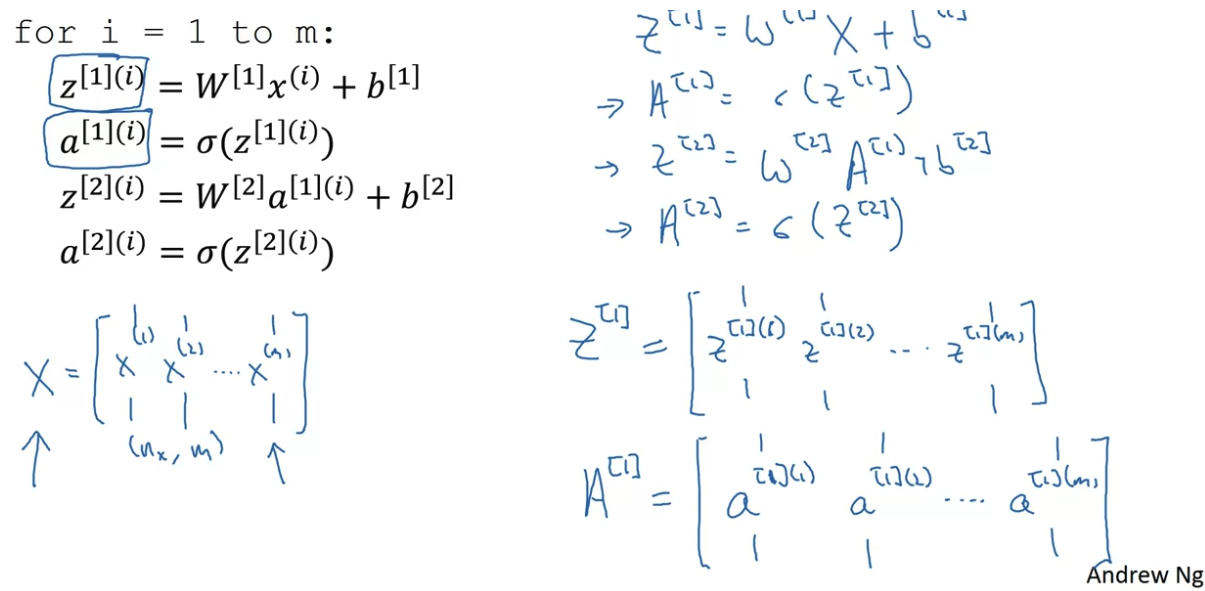
This shows why we have the design matrix X dimensions to be dimension x training_samples (mxn)
Activation functions
- sigmoid: goes between 0 and 1
- tanh: goes between -1 and 1
- ReLU:
- leaky ReLU = tanh would make your hidden layers have mean around 0.
Andrew Ng: "tanhh is almost always better than sigmoid function, except for the output layer where you have to predict 0 or 1. In that case, sigmoid is better. I almost never use sigmoid function as activation function in hidden layers."
Downside of both sigmoid and tanh is that if is large than the derivative/slope is almost equal to 0 (vanishing gradient).
ReLU has derivate 1 when z is positive and 0 when it is negative. If then the derivative is not defined (which does not happen in practice)
Rule of thumb: "ReLU is the default activation function to use if you don't know what activation function to use for hidden layers. For output layer, sigmoid for binary classification, sigmoid for multi-class classification, and no activation for regression."
Leaky ReLU is used when you have a lot of negative values in and you want to avoid the "dead neurons" problem. But in practice ReLU is used more often.
ReLU is used more often than tanh because the slope is very different than 0 for positive values of and NN learns much faster.
Sigmoid is almost never used for hidden layers
ReLU is the most common activation function
You need linear activation function for the output layer for regression problems. Otherwise, on hidden layers there is no point using linear activation function because the NN would be just a linear function (compozition of linear functions is linear).
Derivatives of activation functions
- sigmoid: , derivative at 0 is
- tanh: , , then
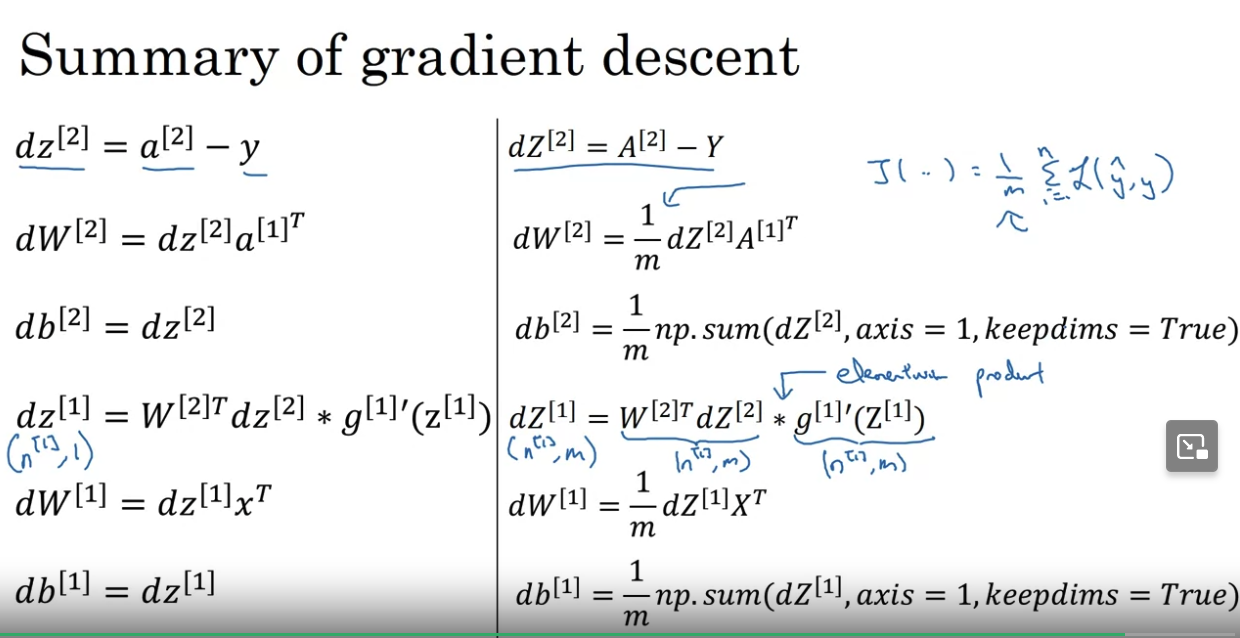
Gradient descent in NN with 1 hidden layer
NN require random initialization of the weights. If they are all 0-s then all activation functions in one layer would be the same values.
Initialization when using sigmoid on tanh it might be better to initailize wth random values which are smaller (for large z the derivative vanishes)
Reminder: The general methodology to build a Neural Network is to:
- Define the neural network structure ( # of input units, # of hidden units, etc).
- Initialize the model's parameters
- Loop:
- Implement forward propagation
- Compute loss
- Implement backward propagation to get the gradients
- Update parameters (gradient descent)
Deep Neural Networks
The deeper the layr the more complex features can be learned. For example in images:
- input layer - pixels
- first layer learns edges
- second layer learns shapes
- third layer learns parts of objects
- fourth layer learns objects
- fifth layer learns scenes
- output
Theory
There are functions which can be represented by a deep NN with a small number of hidden units, but require an exponential number of hidden units in a shallow NN.
Layer : weights, bias
Input: , output:
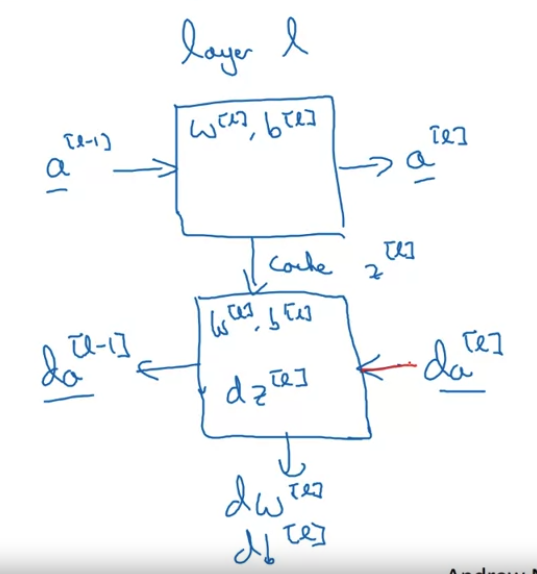
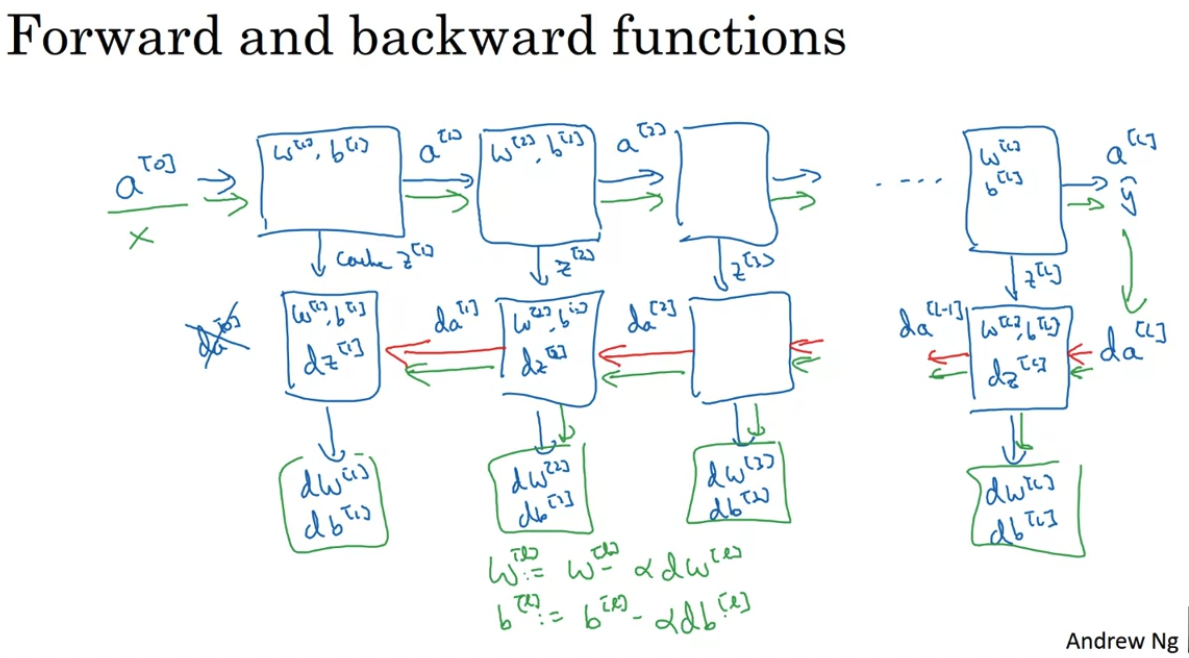
Forward and backward propagation
Deep Learning is good at learning very flexible and complex functions.
DL and NN has nothing to do with the brain. It is just a function approximation algorithm. Neuro science is not very useful for DL - we do not even know how neurons work in the brain.
Implementation of DL
Steps:
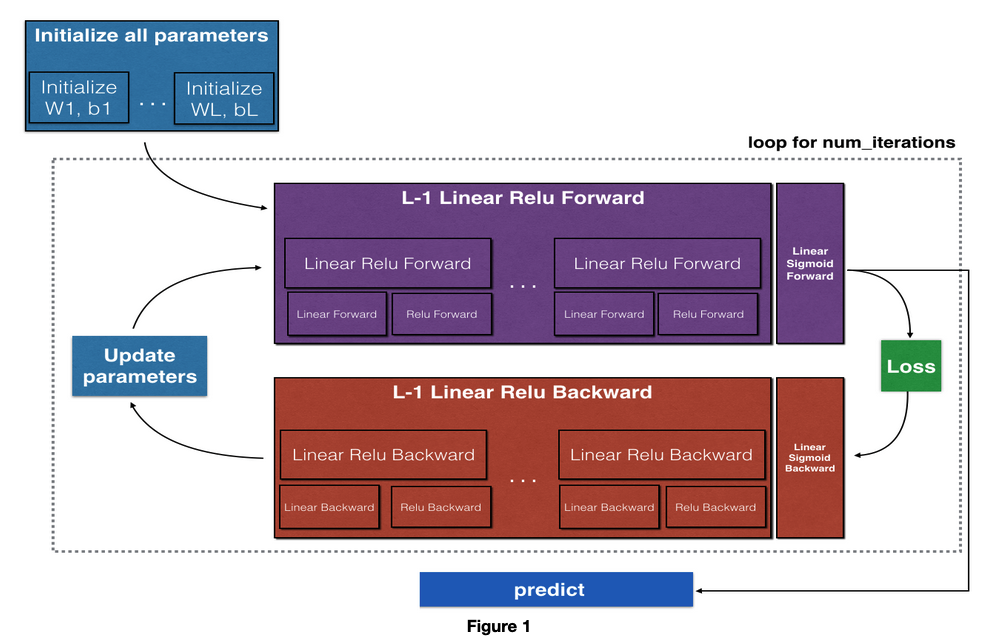
- Initialize the parameters for a two-layer network and for an -layer neural network
- Implement the forward propagation module (shown in purple in the figure below)
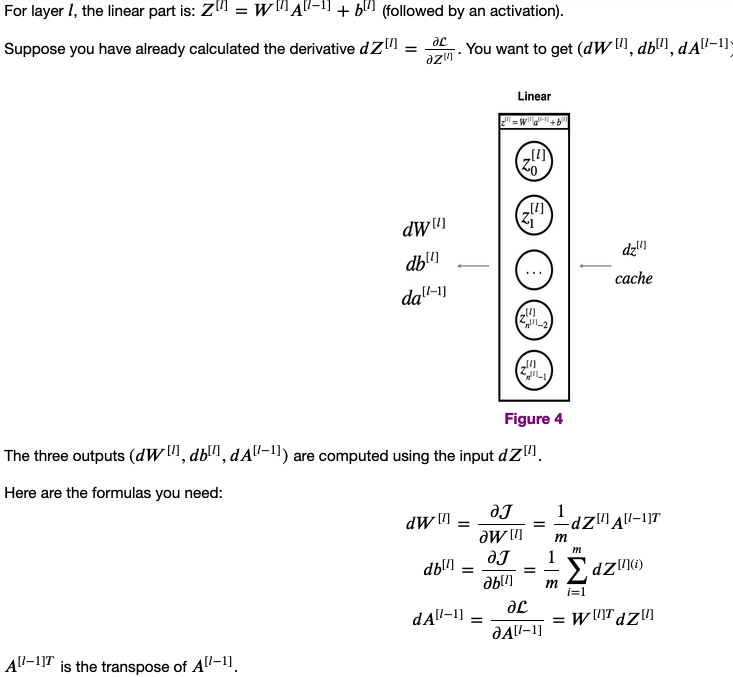
- Complete the LINEAR part of a layer's forward propagation step (resulting in ).
- The ACTIVATION function is provided for you (relu/sigmoid)
- Combine the previous two steps into a new [LINEAR->ACTIVATION] forward function.
- Stack the [LINEAR->RELU] forward function L-1 time (for layers 1 through L-1) and add a [LINEAR->SIGMOID] at the end (for the final layer ). This gives you a new L_model_forward function.
- Compute the loss
- Implement the backward propagation module (denoted in red in the figure below)
- Complete the LINEAR part of a layer's backward propagation step
- The gradient of the ACTIVATION function is provided for you(relu_backward/sigmoid_backward)
- Combine the previous two steps into a new [LINEAR->ACTIVATION] backward function
- Stack [LINEAR->RELU] backward L-1 times and add [LINEAR->SIGMOID] backward in a new L_model_backward function
- Finally, update the parameters
Note:
For every forward function, there is a corresponding backward function. This is why at every step of your forward module you will be storing some values in a cache. These cached values are useful for computing gradients.
In the backpropagation module, you can then use the cache to calculate the gradients.
def initialize_parameters(n_x, n_h, n_y):
"""
Argument:
n_x -- size of the input layer
n_h -- size of the hidden layer
n_y -- size of the output layer
Returns:
parameters -- python dictionary containing your parameters:
W1 -- weight matrix of shape (n_h, n_x)
b1 -- bias vector of shape (n_h, 1)
W2 -- weight matrix of shape (n_y, n_h)
b2 -- bias vector of shape (n_y, 1)
"""
np.random.seed(1)
#(≈ 4 lines of code)
W1 = np.random.randn(n_h, n_x)*0.01
b1 = np.zeros((n_h, 1))
W2 = np.random.randn(n_y, n_h)*0.01
b2 = np.zeros((n_y, 1))
# YOUR CODE STARTS HERE
# YOUR CODE ENDS HERE
parameters = {"W1": W1,
"b1": b1,
"W2": W2,
"b2": b2}
return parameters
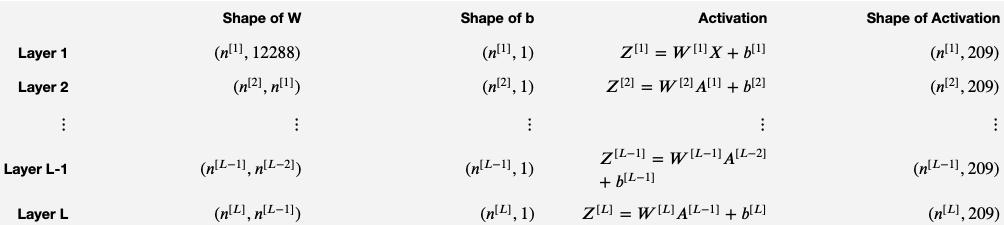
The initialization for a deeper L-layer neural network is more complicated because there are many more weight matrices and bias vectors. When completing the initialize_parameters_deep function, you should make sure that your dimensions match between each layer. Recall that is the number of units in layer . For example, if the size of your input is (with examples) then:
def initialize_parameters_deep(layer_dims):
"""
Arguments:
layer_dims -- python array (list) containing the dimensions of each layer in our network
Returns:
parameters -- python dictionary containing your parameters "W1", "b1", ..., "WL", "bL":
Wl -- weight matrix of shape (layer_dims[l], layer_dims[l-1])
bl -- bias vector of shape (layer_dims[l], 1)
"""
np.random.seed(3)
parameters = {}
L = len(layer_dims) # number of layers in the network
for l in range(1, L):
#(≈ 2 lines of code)
parameters['W' + str(l)] = np.random.randn(layer_dims[l], layer_dims[l-1]) * 0.01
parameters['b' + str(l)] = np.zeros((layer_dims[l],1))
assert(parameters['W' + str(l)].shape == (layer_dims[l], layer_dims[l - 1]))
assert(parameters['b' + str(l)].shape == (layer_dims[l], 1))
return parameters
def linear_forward(A, W, b):
"""
Implement the linear part of a layer's forward propagation.
Arguments:
A -- activations from previous layer (or input data): (size of previous layer, number of examples)
W -- weights matrix: numpy array of shape (size of current layer, size of previous layer)
b -- bias vector, numpy array of shape (size of the current layer, 1)
Returns:
Z -- the input of the activation function, also called pre-activation parameter
cache -- a python tuple containing "A", "W" and "b" ; stored for computing the backward pass efficiently
"""
Z = np.dot(W,A) + b # broadcasting
cache = (A, W, b)
return Z, cache
def linear_activation_forward(A_prev, W, b, activation):
"""
Implement the forward propagation for the LINEAR->ACTIVATION layer
Arguments:
A_prev -- activations from previous layer (or input data): (size of previous layer, number of examples)
W -- weights matrix: numpy array of shape (size of current layer, size of previous layer)
b -- bias vector, numpy array of shape (size of the current layer, 1)
activation -- the activation to be used in this layer, stored as a text string: "sigmoid" or "relu"
Returns:
A -- the output of the activation function, also called the post-activation value
cache -- a python tuple containing "linear_cache" and "activation_cache";
stored for computing the backward pass efficiently
"""
if activation == "sigmoid":
Z, linear_cache = linear_forward(A_prev, W, b)
A, activation_cache = sigmoid(Z)
elif activation == "relu":
Z, linear_cache = linear_forward(A_prev, W, b)
A, activation_cache = relu(Z)
cache = (linear_cache, activation_cache)
return A, cache
Forward propagation full model with L-1 Relu hidden layers and 1 sigmoid output layer:
def L_model_forward(X, parameters):
"""
Implement forward propagation for the [LINEAR->RELU]*(L-1)->LINEAR->SIGMOID computation
Arguments:
X -- data, numpy array of shape (input size, number of examples)
parameters -- output of initialize_parameters_deep()
Returns:
AL -- activation value from the output (last) layer
caches -- list of caches containing:
every cache of linear_activation_forward() (there are L of them, indexed from 0 to L-1)
"""
caches = []
A = X
L = len(parameters) // 2 # number of layers in the neural network
for l in range(1, L):
A_prev = A
#(≈ 2 lines of code)
A, cache = linear_activation_forward(A_prev, parameters['W'+str(l)],parameters['b'+str(l)], 'relu')
caches.append(cache)
AL, cache = linear_activation_forward(A, parameters['W'+str(L)], parameters['b'+str(L)], 'sigmoid')
caches.append(cache)
return AL, caches
Compute the cross-entropy cost , using the following formula: :
def compute_cost(AL, Y):
"""
Implement the cost function defined by equation (7).
Arguments:
AL -- probability vector corresponding to your label predictions, shape (1, number of examples)
Y -- true "label" vector (for example: containing 0 if non-cat, 1 if cat), shape (1, number of examples)
Returns:
cost -- cross-entropy cost
"""
m = Y.shape[1]
cost = -(np.dot(Y.T,log(AL))+np.dot(1-Y.T,log(1-AL))/m
cost = np.squeeze(cost) # To make sure your cost's shape is what we expect (e.g. this turns [[17]] into 17).
return cost
- Linear backward
def linear_backward(dZ, cache):
"""
Implement the linear portion of backward propagation for a single layer (layer l)
Arguments:
dZ -- Gradient of the cost with respect to the linear output (of current layer l)
cache -- tuple of values (A_prev, W, b) coming from the forward propagation in the current layer
Returns:
dA_prev -- Gradient of the cost with respect to the activation (of the previous layer l-1), same shape as A_prev
dW -- Gradient of the cost with respect to W (current layer l), same shape as W
db -- Gradient of the cost with respect to b (current layer l), same shape as b
"""
A_prev, W, b = cache
m = A_prev.shape[1]
dW = np.dot(dZ,A_prev.T)/m
db = np.sum(dZ,axis=1,keepdims=True)/m # sum by the rows of dZ with keepdims=True
dA_prev = np.dot(W.T,dZ)
return dA_prev, dW, db
def linear_activation_backward(dA, cache, activation):
"""
Implement the backward propagation for the LINEAR->ACTIVATION layer.
Arguments:
dA -- post-activation gradient for current layer l
cache -- tuple of values (linear_cache, activation_cache) we store for computing backward propagation efficiently
activation -- the activation to be used in this layer, stored as a text string: "sigmoid" or "relu"
Returns:
dA_prev -- Gradient of the cost with respect to the activation (of the previous layer l-1), same shape as A_prev
dW -- Gradient of the cost with respect to W (current layer l), same shape as W
db -- Gradient of the cost with respect to b (current layer l), same shape as b
"""
linear_cache, activation_cache = cache
if activation == "relu":
dZ = relu_backward(dA, activation_cache)
dA_prev, dW, db = linear_backward(dZ, linear_cache)
elif activation == "sigmoid":
dZ = sigmoid_backward(dA, activation_cache)
dA_prev, dW, db = linear_backward(dZ, linear_cache)
return dA_prev, dW, db
def L_model_backward(AL, Y, caches):
"""
Implement the backward propagation for the [LINEAR->RELU] * (L-1) -> LINEAR -> SIGMOID group
Arguments:
AL -- probability vector, output of the forward propagation (L_model_forward())
Y -- true "label" vector (containing 0 if non-cat, 1 if cat)
caches -- list of caches containing:
every cache of linear_activation_forward() with "relu" (it's caches[l], for l in range(L-1) i.e l = 0...L-2)
the cache of linear_activation_forward() with "sigmoid" (it's caches[L-1])
Returns:
grads -- A dictionary with the gradients
grads["dA" + str(l)] = ...
grads["dW" + str(l)] = ...
grads["db" + str(l)] = ...
"""
grads = {}
L = len(caches) # the number of layers
m = AL.shape[1]
Y = Y.reshape(AL.shape) # after this line, Y is the same shape as AL
# Initializing the backpropagation
#(1 line of code)
dAL = - (np.divide(Y, AL) - np.divide(1 - Y, 1 - AL)) # derivative of cost with respect to AL
# Lth layer (SIGMOID -> LINEAR) gradients. Inputs: "dAL, current_cache". Outputs: "grads["dAL-1"], grads["dWL"], grads["dbL"]
#(approx. 5 lines)
current_cache = caches[-1]
dA_prev_temp, dW_temp, db_temp = linear_activation_backward(dAL, current_cache ,'sigmoid')
grads["dA" + str(L-1)] = dA_prev_temp
grads["dW" + str(L)] = dW_temp
grads["db" + str(L)] = db_temp
# Loop from l=L-2 to l=0
for l in reversed(range(L-1)):
# lth layer: (RELU -> LINEAR) gradients.
current_cache = caches[l]
dA_prev_temp, dW_temp, db_temp = linear_activation_backward(dA_prev_temp, current_cache ,'relu')
grads["dA" + str(l)] = dA_prev_temp
grads["dW" + str(l+1)] = dW_temp
grads["db" + str(l+1)] = db_temp
return grads